近日,六合彩結果-六合彩開獎號碼
印真團隊在生物混合微機器人研究方面發表文章,相關研究以 “Biohybrid navigation: Fusing intrinsic motility with external magnetic steering” 為題,發表于Cell姊妹刊《Matter》。該論文以同濟大學為第一單位,印真教授為唯一通訊作者。
微型機器人在生物醫學領域具有廣闊應用前景,可用于靶向藥物遞送、微創診斷及體內復雜環境探測等。然而,在實際生物環境中,微型機器人往往面臨高黏度流體阻力、狹窄通道限制以及復雜幾何結構帶來的運動不穩定與易滯留等問題,嚴重制約其運動效率和可控性。
針對上述挑戰,Akolpoglu等人圍繞復雜生物微環境中微型機器人的穩定推進與精準導航問題,提出了一種融合生物自主運動能力與外部磁場調控的生物混合導航策略。該方法通過將天然具備鞭毛推進能力的微藻與磁性納米顆粒相結合,在保留其內在生物運動特性的同時,引入外部磁場實現方向引導,從而實現對微型機器人運動軌跡的有效調控。
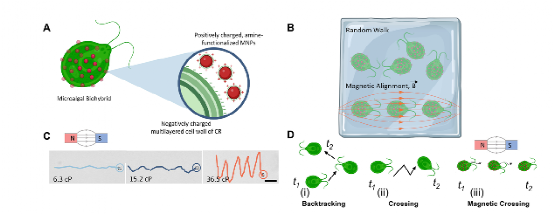
如圖所示,構建了一種表面功能化的生物混合微機器人結構模型。微藻細胞表面均勻負載帶正電的磁性納米顆粒,在不破壞其天然鞭毛結構和推進機制的前提下,使其獲得對外部磁場的響應能力。該設計實現了生物自主推進與人工磁控單元的有效融合,為后續的精準導航提供了結構基礎。
生物混合微機器人在外加磁場作用下,其原本隨機游動的運動模式可被有效轉變為具有明確方向性的直線或準直線運動。在高黏度流體環境中,盡管整體運動速度有所降低,但在磁場引導下,其運動方向保持穩定,顯著減少了反向回退和無效擺動行為。
該研究表明,將生物體長期進化形成的高效運動機制與溫和、非侵入式的磁場調控手段相結合,是實現微型機器人復雜環境導航的一種簡潔而有效的解決思路。相關成果為生物混合微機器人在靶向治療、微創醫療及復雜生物微環境探索等領域的應用提供了新的技術支撐。
本研究得到了國家自然科學基金和上海市教育委員會相關項目的支持。
論文鏈接://doi.org/10.1016/j.matt.2025.102354
