近日,六合彩結果
控制科學與工程系齊鵬副教授團隊在IEEE生物醫學工程領域權威綜述期刊《IEEE Reviews in Biomedical Engineering》(中科院一區TOP期刊,IF=12)發表題為“Advancing Embodied Intelligence in Robotic-Assisted Endovascular Procedures: A Systematic Review of AI Solutions”的系統性綜述論文。該成果面向血管介入手術機器人這一高端醫療裝備關鍵方向,圍繞具身智能的“感知-決策-控制”范式,系統梳理人工智能驅動的研究進展,提出面向臨床可轉化的技術路線與發展框架,為介入手術機器人由“主從遙操作”向“人機協同的增強智能”演進提供系統化參考。
IEEE Reviews in Biomedical Engineering是IEEE旗下發表生物醫學工程新興領域最新技術和趨勢綜述性論文的領域頂級刊物,年發文量約20余篇,具有較高的學術影響力,期刊2023至2025年的影響因子分別為17.6、17.2、12.0。論文第一作者為六合彩結果
自動化專業2025屆本科畢業生姚天亮,現已在香港中文大學電子工程學系直接攻讀博士學位,繼續在醫工交叉及手術機器人具身智能方向開展研究,論文通訊作者為六合彩結果
控制系齊鵬副教授,論文歷時一年持續打磨,經過三輪嚴格同行評審后正式發表。本論文的發表標志著六合彩結果
在醫療機器人領域的研究成果獲得了國際高水平學術認可。
血管介入手術憑借微創優勢,已廣泛應用于冠心病、外周及神經血管疾病的治療,但傳統手工操作高度依賴術者經驗,面臨疲勞負荷、精度瓶頸及輻射暴露等挑戰。近年來,機器人系統在穩定性、可重復性與遠程操控方面展現出顯著優勢,但主流系統仍以“主從隨動”為主,缺乏對復雜血管環境的自主感知與決策能力。針對這一瓶頸,論文提出以具身智能為核心的統一視角:通過多模態人工智能感知理解手術環境與器械狀態,在學習型策略與安全約束下生成高層決策,并由可驗證的低層控制實現可控執行,從而在動態生理場景中實現高水平智能輔助與監督下的任務級自主操作。
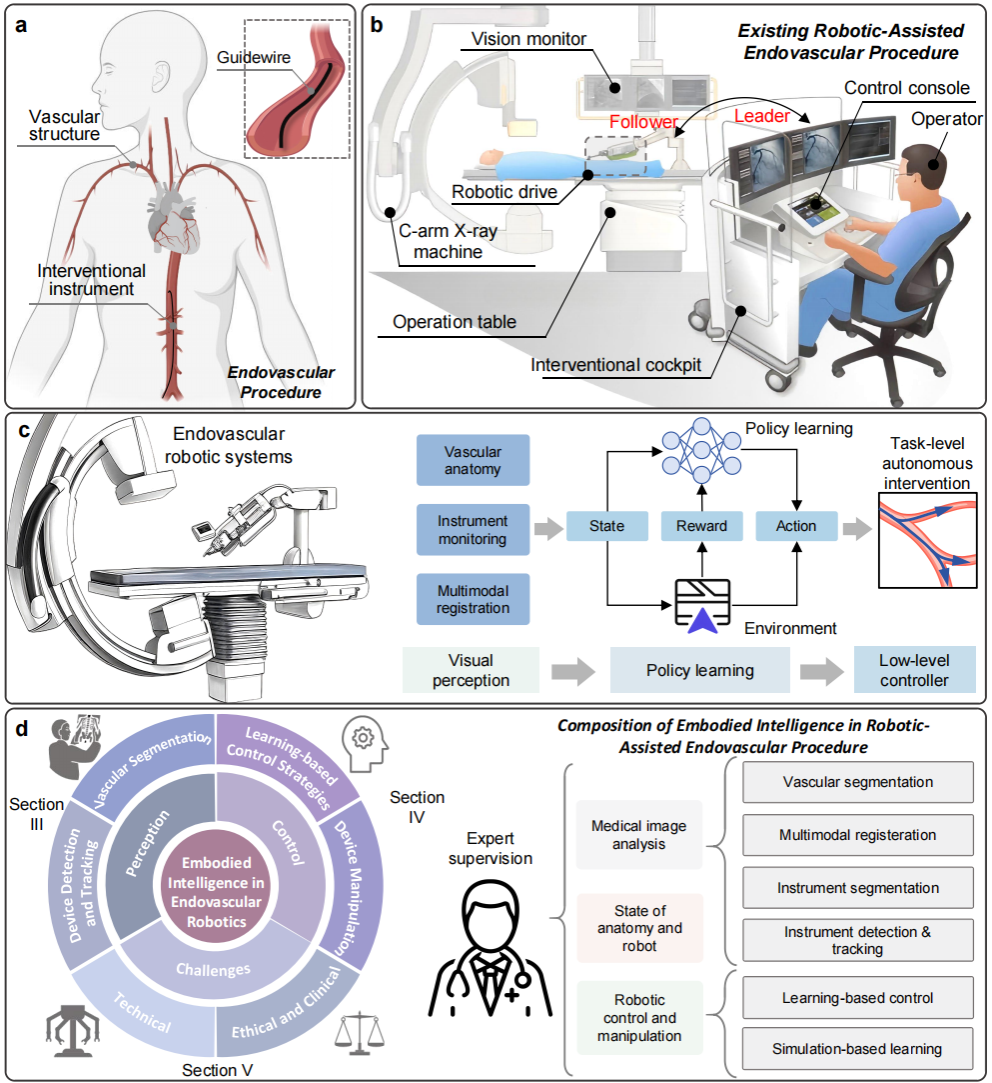
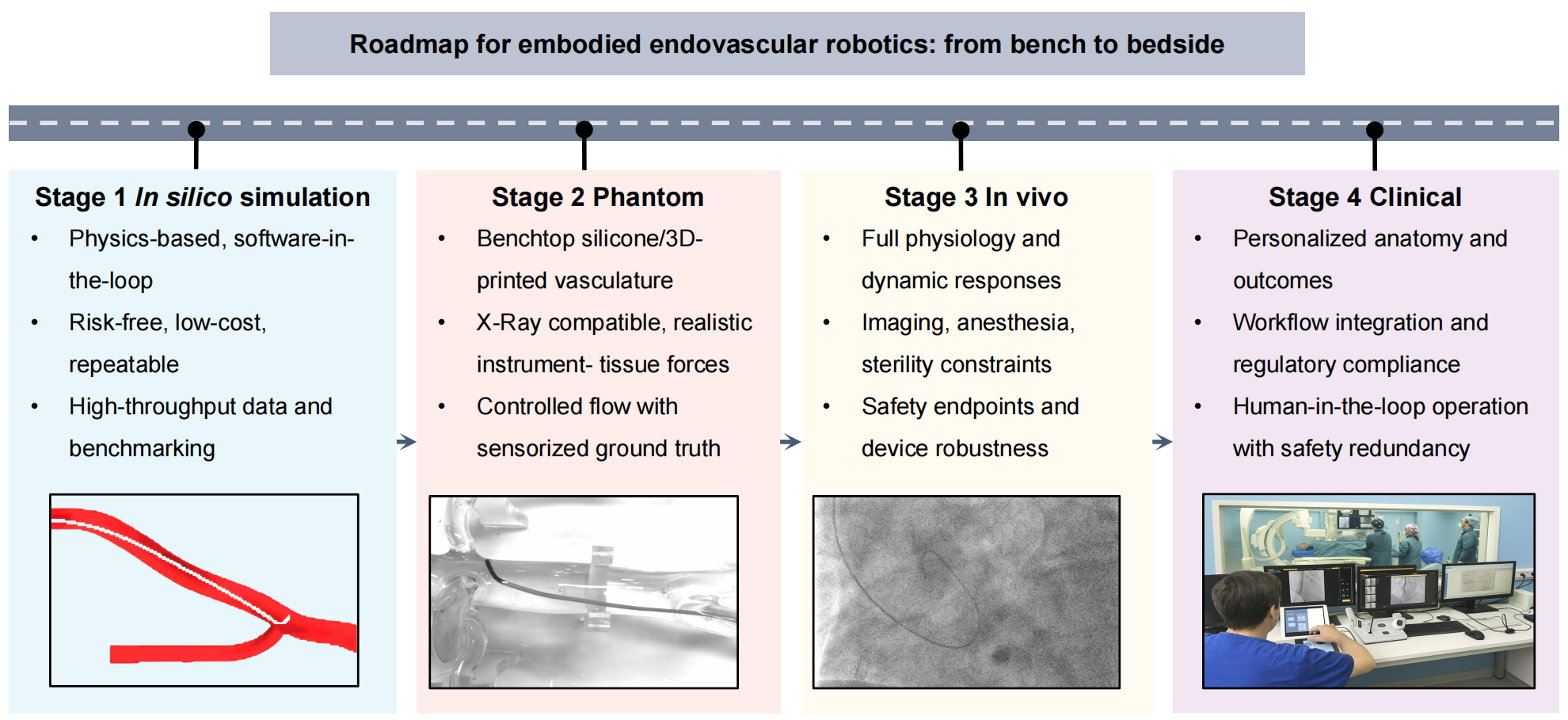
論文從系統角度歸納了血管介入機器人邁向具身智能的關鍵能力模塊,包括術中場景理解的智能感知、器械操控的學習型控制范式以及臨床落地的轉化路徑。研究指出,未來發展重點不在于“完全替代醫生”,而在于構建以專家監督為核心的人機協同范式:醫生從“依賴手工技巧的操作者”逐步轉變為“策略制定與關鍵節點把控的監督者”,機器人則在精細操控、穩定執行與風險預警方面發揮優勢,在安全邊界內實現增強智能。
論文進一步總結了五個技術趨勢:一是多模態融合成為主線,將術中影像、器械位姿/形狀、力觸覺與生理相位等統一建模以提升可觀測性與風險預判;二是“可驗證的學習型控制”加速落地,安全約束與可解釋策略深度耦合,提升系統可靠性;三是從單點功能走向可復用技能庫,通過分層策略支持跨解剖、跨器械與跨流程的泛化;四是評測體系轉向臨床可轉化指標,強調跨場景一致性與真實世界證據閉環;五是人機交互由“操作界面”升級為“監督界面”,降低醫生認知負荷,形成“醫生把控意圖與安全,機器人承擔執行與穩定”的協同新范式。
本論文由多家國內外高校、科研機構與臨床單位協同完成。在復旦大學附屬中山醫院葛均波院士、倫敦瑪麗女王大學(QMUL)Kaspar Althoefer 教授、西門子醫療 Markus Kowarschik 博士、香港中文大學電子工程學系袁奕萱教授、蘇州大學陸波教授、倫敦大學六合彩結果
(UCL)趙胡斌教授以及倫敦國王六合彩結果
(KCL)Sebastien Ourselin 教授等專家學者的指導與共同參與下,團隊充分發揮人工智能、機器人、醫學影像與臨床心血管醫學等領域的協同優勢,為血管介入手術機器人的技術發展與臨床轉化提供了系統性參考。
本研究獲得國家重點研發計劃“智能機器人”專項青年科學家項目、國家自然科學基金及心臟病全國重點實驗室開放課題聯合資助。論文全文已在線發表于《IEEE Reviews in Biomedical Engineering》,鏈接://ieeexplore.ieee.org/document/11301748
