2026年6月5日,由六合彩結果
舉辦的智信講堂第91期在智信館117報告廳開講。本次講堂特邀英國林肯大學Timothy Gordon教授作“Short-Horizon Predictive Steering Control within an Artificial-Flow-Guidance-Based Unified Co-Pilot Architecture”主題報告。
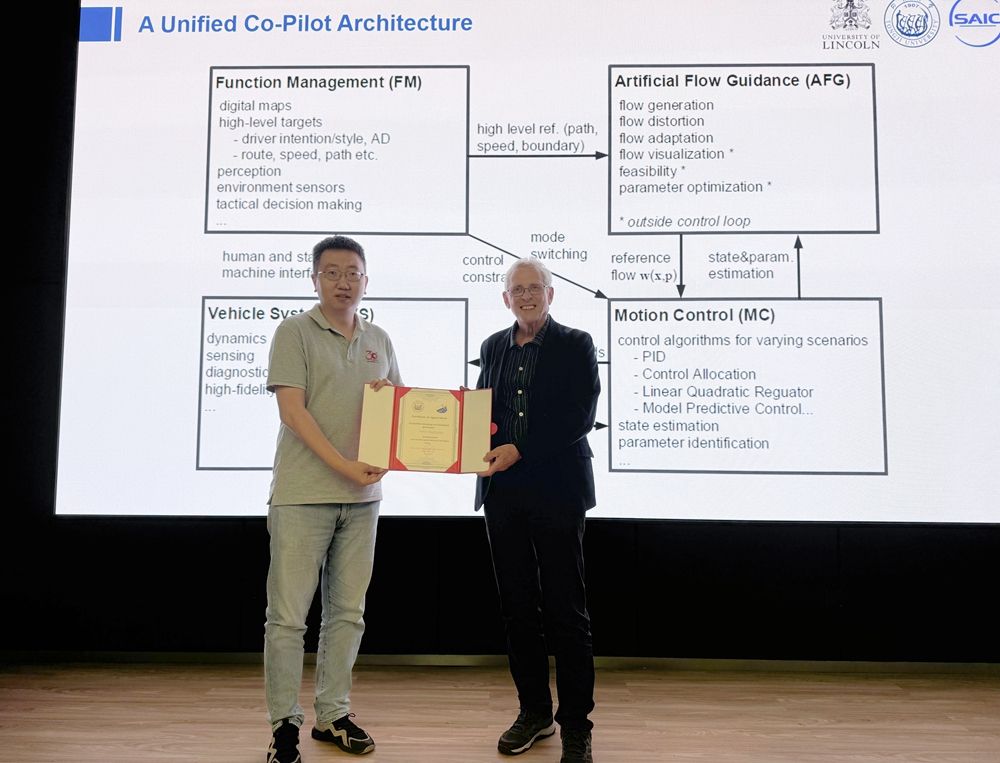
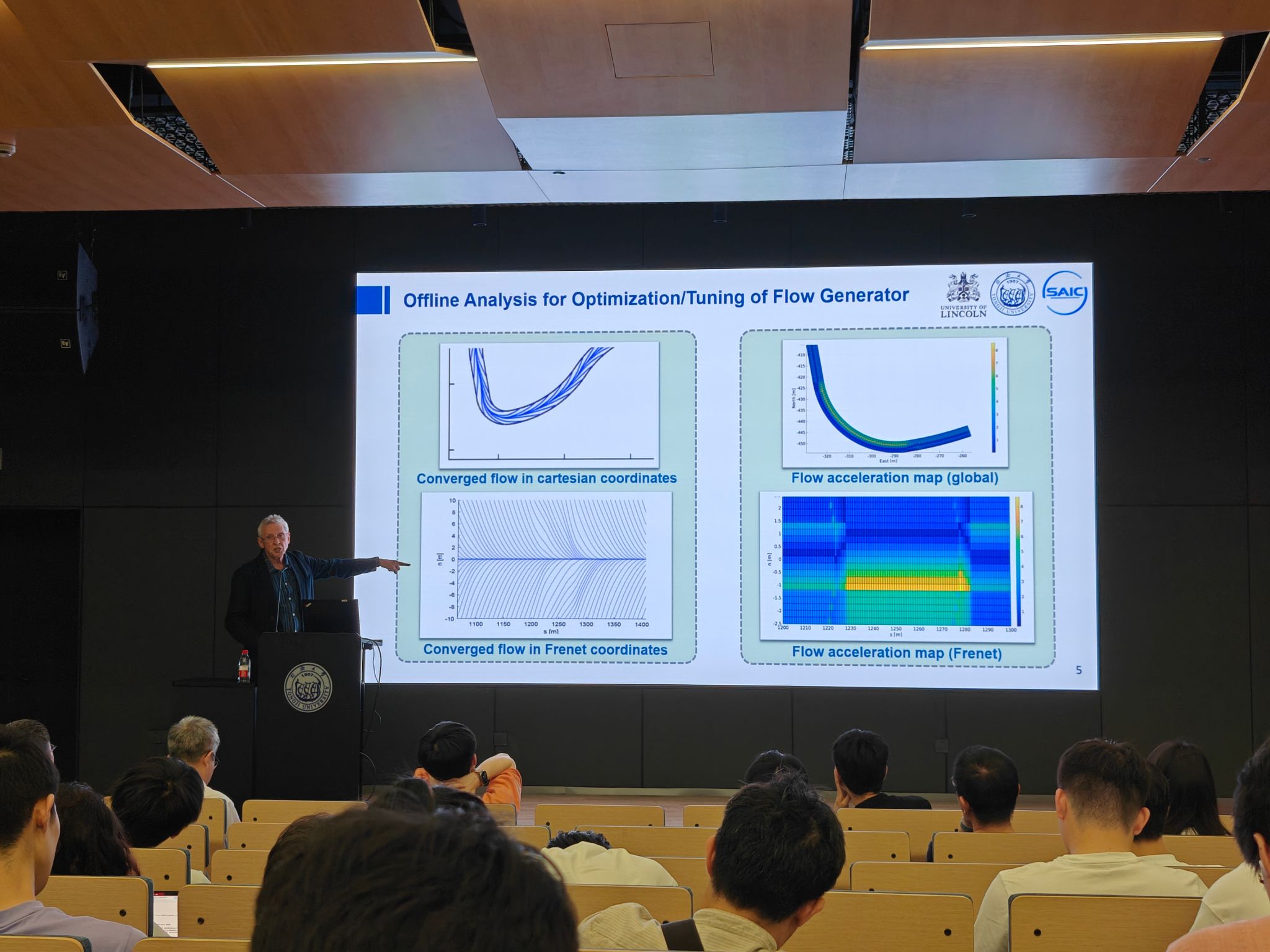
在本次報告中,Gordon教授圍繞自動駕駛車輛動力學控制前沿問題,首先介紹了基于人工流場引導(Artificial Flow Guidance, AFG)的車輛動力學控制參考生成方法,隨后系統闡述了以人工流場方法為核心的模塊化、標準化、敏捷化自動駕駛動力學集成控制架構。面向自動駕駛豐富復雜的應用場景,Gordon教授提出了多模型、多參考、多算法協同設計的技術思路,為提升車輛運動控制系統的適應性、魯棒性和可擴展性提供了新的研究視角。在工程實踐層面,報告展示了AFG基礎算法在不同典型工況下的應用效果,并進一步介紹了融合短時預瞄機制的AFG-MacAdam方法及其實車驗證結果。

報告結束后,Gordon教授與在場師生就AI在車輛動力學控制領域的應用等問題進行了親切交流和討論。他結合自身經歷,勉勵同學們積極拓寬視野、勇于探索,發現并解決新的科學問題。此次報告進一步拓展了我校師生的學術視野,加深了對自動駕駛場景下的車輛動力學控制的理解和認識。